
Some OpenGL software loaded the images extracted from the video and then displayed them on top of a 3D GPS trajectory. It worked fine, but I only did it once and took no screenshots or videos and told no more than one or two people about it. Maybe I thought it was a such a good idea it had to be kept secret until the opportunity to capitalize arose, obviously the opportunity is now long past. But it it still was fun to have done and having it run again would be cool... but I couldn't find it on any of my still running desktop computers or laptops. Eventually I found a 250GB Maxtor drive in a shoebox and plugged it in with a usb-to-sata adapter, and there it was: 700 megabytes of video and images all nicely organized along with scripts and source code. And it compiled: after resolving the SDL dependencies the only thing I had to do was move the ordering -lGL etc. linker options to be after the listing of object files: $(CXX) -o $(PROGRAM) $(OBJECTS) $(LIBS) instead of $(CXX) -o $(PROGRAM) $(LIBS) $(OBJECTS). And it ran fine with ./gpsimage --gps ../capture_10_22_
 |
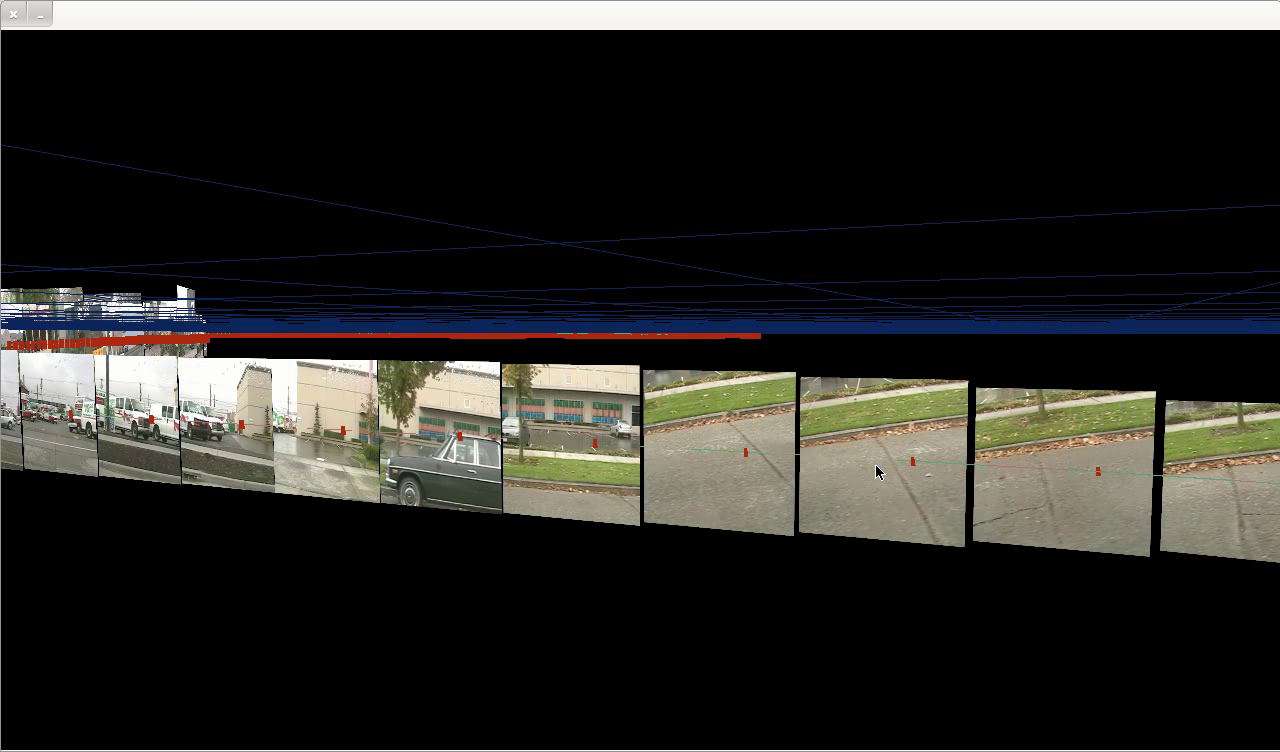
| Ballard surface streets |

 |
| Ballard surface streets |


 |
| Exiting the tunnel to get on the viaduct |
 |
| Driving south on the 99 viaduct looking west |

Implementation
It might be nice to actually check in some of the code to github or something, but for now I'll document the important parts here.
I used dvgrab to extract video from the camera, and converted that to decimated timestamped bmp images. The text gps log which looks like this:
$GPGGA,162651.395,4740.2379,N,12222.4207,W,1,06,1.5,15.0,M,-17.3,M,0.0,0000*7E
$GPGSA,A,3,23,13,16,20,01,25,,,,,,,2.8,1.5,2.4*3A
$GPGSV,3,1,09,23,81,041,46,13,51,298,48,16,46,083,46,20,42,175,44*7F
$GPGSV,3,2,09,01,20,100,37,04,19,284,34,27,19,240,40,25,16,061,40*7E
$GPGSV,3,3,09,24,12,320,30*47
$GPRMC,162651.395,A,4740.2379,N,12222.4207,W,22.57,179.63,221004,,*2C
$GPGGA,162652.395,4740.2316,N,12222.4208,W,1,06,1.5,14.4,M,-17.3,M,0.0,0000*7E
$GPGSA,A,3,23,13,16,20,01,25,,,,,,,2.8,1.5,2.4*3A
$GPRMC,162652.395,A,4740.2316,N,12222.4208,W,22.64,178.75,221004,,*2F
$GPGGA,162653.395,4740.2253,N,12222.4208,W,1,06,1.5,13.8,M,-17.3,M,0.0,0000*74
$GPGSA,A,3,23,13,16,20,01,25,,,,,,,2.8,1.5,2.4*3A
$GPRMC,162653.395,A,4740.2253,N,12222.4208,W,22.76,178.28,221004,,*25
$GPGGA,162654.395,4740.2189,N,12222.4208,W,1,06,1.5,13.2,M,-17.3,M,0.0,0000*7D
$GPGSA,A,3,23,13,16,20,01,25,,,,,,,2.8,1.5,2.4*3A
...
was converted like this:
ifstream parts(fileName.c_str());
if (!parts) {
OUT("File \"" << fileName << "\" not found.");
exit(1);
}
vector3f initialPos;
string lines;
while (getline(parts,lines)) {
//cout << lines << "\n";
vector<string> tokens = tokenize(lines,",");
if ((tokens.size() > 0) && (tokens[0] == "$GPGGA") && tokens.size() > 9) {
float rawTime = atof(tokens[1].c_str());
int tsec = (int)rawTime%100;
int tmin = ((int)rawTime/100)%100;
/// convert to local time
int thr = (int)rawTime/10000 -7;
float time = (float)thr + ((float)tmin+tsec/60.0f)/60.0f;
vector3f pos = vector3f(10000.0f*atof(tokens[2].c_str())-initialPos[0],
atof(tokens[9].c_str())-initialPos[1],
-10000.0f*atof(tokens[4].c_str())- initialPos[2]
);
if (initialPos == vector3f()) {
initialPos = pos;
pos = vector3f(0,0,0);
}
pair<float,vector3f> tp(time,pos);
timePos.push_back(tp);
}
}
(tokenize was a function to split up lines of text, I think the standard C++ libraries didn't do that at the time)
The timestamped bmp files look like this in a directory:
vid_2004.10.20_09-24-49.bmp
vid_2004.10.20_09-24-50.bmp
vid_2004.10.20_09-24-51.bmp
vid_2004.10.20_09-24-52.bmp
vid_2004.10.20_09-24-53.bmp
vid_2004.10.20_09-24-54.bmp
...
And read in like this:
ifstream bmpList(bmpListFileName.c_str());
if (!bmpList) {
OUT("File \"" << fileName << "\" not found.");
exit(1);
}
while (getline(bmpList,lines)) {
vector<string> tokens = tokenize(lines,".");
if (tokens.size() > 3) {
string messyTime = tokens[tokens.size()-2];
vector<string> items = tokenize(tokenize(messyTime,"-"),"_");
if (items.size() == 4) {
//OUT( items[1] << ":" << items[2] << ":" << items[3]);
float time = atof(items[1].c_str())
+(atof(items[2].c_str())
+(atof(items[3].c_str())/60.0f))/60.0f;
/// arbitrary offset to match gps to images better
time += .012f;
timeImage.push_back(pair<float,string>(time,lines));
} else {
OUT("list time wrongly formatted " << messyTime);
}
} else {
OUT("list items have wrong format" << lines);
}
}
Then brute force O(n^2) the correspondence between image timestamps and gps timestamps:
/// using the times extracted from the bmp file names, find what the closest
/// gps coordinates for those times
for (unsigned i = 0; i < timeImage.size(); i++) {
for (unsigned j = 0; j < timePos.size()-1; j++) {
if ((timePos[j].first <= timeImage[i].first)
&& (timePos[j+1].first > timeImage[i].first)) {
struct tpi newTpi;
newTpi.time = timeImage[i].first;
/// interpolate - is this working?
float factor = (newTpi.time - timePos[j].first)
/ (timePos[j+1].first - timePos[j].first);
//OUT(i << " " <<j << " " <<factor);
newTpi.pos = timePos[j].second
+ (timePos[j+1].second - timePos[j].second) * factor;
createTexture(newTpi.texture, timeImage[i].second);
/// don't interpolate just use the same point
//newTpi.pos = timePos[j].second;
/// attitude
vector3f up = vector3f(0,1.0f,0);
/// this is arbitrary based on the fact the video was shot at a right angle to
/// the direction of travel
vector3f right = (timePos[j+1].second - timePos[j].second);
right = right/right.Length();
// make all axes orthogonal
vector3f out = Cross(up,right);
up = Cross(right,out);
// normalize
out = out/out.Length();

up = up/up.Length();
newTpi.attitude.Set(right,up,out);
/// scale
if (i >0) {
newTpi.scale = (newTpi.pos - tpiList[i-1].pos).Length()/2.0f;
} else {
newTpi.scale = 5.0f;
}
tpiList.push_back(newTpi);
}
}
}
And then draw it later:
void gps::draw()
{
/// the gps signal
glPushAll();
glColor3f(0.67398f,.459f, 0.459f);
glBegin(GL_LINE_STRIP);
for (unsigned i = 0; i <timePos.size(); i++) {
/// subtract first position to make path always start from origin
glVertex3fv((timePos[i].second).vertex);
}
glEnd();
glColor3f(0.67398f,.159f, 0.059f);
glPointSize(9.0f);
glBegin(GL_POINTS);
for (unsigned i = 0; i <timePos.size(); i++) {
/// subtract first position to make path always start from origin
glVertex3fv((timePos[i].second).vertex);
}
glEnd();
/// interpolated image position
glColor3f(0.37398f,.659f, 0.459f);
glBegin(GL_LINE_STRIP);
for (unsigned i = 0; i <tpiList.size(); i++) {
glVertex3fv((tpiList[i].pos).vertex);
}
glEnd();
/* glColor3f(0.17398f,0.559f, 0.859f);
glPointSize(10.0f);
glBegin(GL_POINTS);
for (unsigned i = 0; i <tpiList.size(); i++) {
glVertex3fv((tpiList[i].pos).vertex);
}
glEnd();
*/
glPopAll();
glPushAll();
glEnable(GL_TEXTURE_2D);
glColor3f(1.0f,1.0f,1.0f);
/// always pointed at camera
//matrix16f temp = Registry::instance()->theCamera->location;
//temp.SetTranslation(vector3f(0.0f,0.0f,0.0f));
vector3f loc = Registry::instance()->theCamera->location.GetTranslation();
int oldI = 0;
for (unsigned i = 0; i <tpiList.size(); i++) {
float scale = tpiList[i].scale;
/// simple distance culling
float dist = (loc - tpiList[i].pos).Length();
/*if ((dist >= 5000)) {
/// make far away textures bigger, and show less of them
float f= dist/5000;
f =f*f;
i += (int)f+1;
scale*= f;
}*/
if ((dist > 3000) && (dist <= 8000)) {
if (i%5==0) {
//i+=10;
scale *=5;
} else {
dist = 20000;
}
}
if (dist > 8000) {
if (i%10==0) {
//i+=10;
scale *=10;
} else {
dist = 20000;
}
glColor3f(1.0f,1.0f,1.0f);
/// always pointed at camera
//matrix16f temp = Registry::instance()->theCamera->location;
//temp.SetTranslation(vector3f(0.0f,0.0f,0.0f));
vector3f loc = Registry::instance()->theCamera->location.GetTranslation();
int oldI = 0;
for (unsigned i = 0; i <tpiList.size(); i++) {
float scale = tpiList[i].scale;
/// simple distance culling
float dist = (loc - tpiList[i].pos).Length();
/*if ((dist >= 5000)) {
/// make far away textures bigger, and show less of them
float f= dist/5000;
f =f*f;
i += (int)f+1;
scale*= f;
}*/
if ((dist > 3000) && (dist <= 8000)) {
if (i%5==0) {
//i+=10;
scale *=5;
} else {
dist = 20000;
}
}
if (dist > 8000) {
if (i%10==0) {
//i+=10;
scale *=10;
} else {
dist = 20000;
}
}
if (dist < 16000) {
glBindTexture(GL_TEXTURE_2D, tpiList[i].texture);
glBegin(GL_QUADS);
matrix16f temp = tpiList[i].attitude;
glTexCoord2f(0.0f, 0.0f);
glVertex3fv((tpiList[i].pos+temp.Transform(scale*vector3f(1.0,1.0,0.0))).vertex);
glTexCoord2f(1.0f, 0.0f);
glVertex3fv((tpiList[i].pos+temp.Transform(scale*vector3f(-1.0,1.0,0.0))).vertex);
glTexCoord2f(1.0f, 1.0f);
glVertex3fv((tpiList[i].pos+temp.Transform(scale*vector3f(-1.0,-1.0,0.0))).vertex);
glTexCoord2f(0.0f, 1.0f);
glVertex3fv((tpiList[i].pos+temp.Transform(scale*vector3f(1.0,-1.0,0.0))).vertex);
glEnd();
}
oldI = i;
}
glPopAll();
}
Future
A few other old projects could be revived, though some have more obscure dependencies (paragui and maybe another opengl gui). It's not a high priority but it would be nice to create better records now than wait even longer for more bitrot to set in, and I have a restored interest in low-ish level OpenGL so it would be nice to get refreshed on the stuff I've already done.
No comments:
Post a Comment