ARToolKit assisted laser rangefinding from binarymillenium on Vimeo.
It's not that inexpensive, since I'm using a high resolution network camera similar to an Elphel- but it's possible I could replace it with a good consumer still camera with a linux supported usb interface for getting live images.
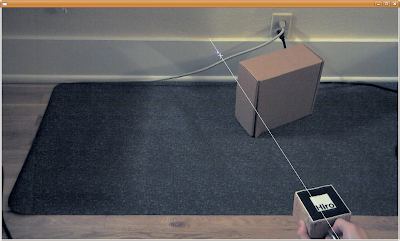
In the above screen shot the line projected from the found fiducial is shown, and the target where the found red laser dot is- they ought to cross each other but I need to learn more about transforming coordinates in and out of the camera space in ARToolkit to improve upon it.

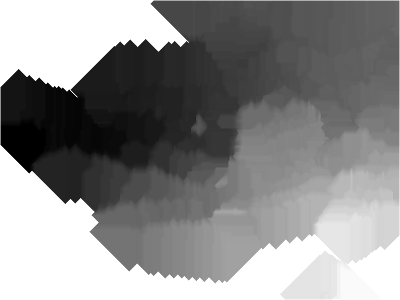

This picture shows that the left side of the screen is 'further' away than the wall on the right, but that is not quite right- it is definitely further away from the fiducial, so I may be making an error.
source code
No comments:
Post a Comment