2016-04-08
2014-02-20
Getting started with V-Rep with Octave on Ubuntu for AMRx
This edX Autonomous Mobile Robots course started last week, and the V-Rep simulator with an octave/Matlab interface is going to be a big part of the optional exercises for the course. There is a free temporary license available for Matlab, but I don't like installing proprietary binaries on my Linux system, especially temporarily (Linux and Ubuntu really needs a standard way of installing applications into per-user directories that don't require system root). So I'm trying out the Octave route.
Octave 3.6.2 is available as a standard package for my Ubuntu 12.10 install, but didn't work initially with the AMRx exercise 1 test scripts, so I had to build my own remApi.oct.

The edX platform has some annoying quirks I've documented elsewhere. But other than that it is pretty good.

V-REP is impressive also (coming from using Gazebo a great deal over the past six months), but has an annoying feature where a mouse right click can both rotate the view and open a context menu, the very first option is to close the 3D view window. So it is very possible especially on a laptop trackpad to accidentally try to rotate but end up closing the window of the view that was to be rotated.

The first thing I tried was to launch vrep.sh from the vrep tar ball, load the exercise 1 ttt scene, and then enter the exercise1/code/common/vrep/ directory, launch octave, and try to run test.m:
Octave 3.6.2 is available as a standard package for my Ubuntu 12.10 install, but didn't work initially with the AMRx exercise 1 test scripts, so I had to build my own remApi.oct.
Building remApi.oct
Get the mkoct binary for octave:
sudo apt-get install octave-pkg-dev
There is a file in the vrep tar ball to run within octave:
V-REP_PRO_EDU_V3_1_0_64_Linux/
It needs some setup first, which is documented within it:
cd V-REP_PRO_EDU_V3_1_0_64_Linux/
cp ../../remoteApi/* .
cp ../../include/* .
octave
octave:4> buildLin
extApiPlatform.c: In function ‘extApi_readFile’:
extApiPlatform.c:222:8: warning: ignoring return value of ‘fread’, declared with attribute warn_unused_result [-Wunused-result]
remApi.cc: In function ‘octave_value_list FsimxAddStatusbarMessage(const octave_value_list&, int)’:
remApi.cc:161:35: warning: ‘octave_value::octave_value(
remApi.cc: In function ‘octave_value_list FsimxCopyPasteObjects(const octave_value_list&, int)’:
...
remApi.cc:2834:31: warning: ‘void Array<T>::resize(octave_idx_
remApi.cc: In function ‘octave_value_list FsimxUnpackInts(const octave_value_list&, int)’:
remApi.cc:2856:29: warning: ‘void Array<T>::resize(octave_idx_
octave:4> exit
cp remApi.oct ~/own/edx_amrx/exercise1/code/
cd ~/own/edx_amrx/exercise1/code/
octave
octave:1> test
And it works! The connection from octave to the running V-REP is established, and then the script commands the simulation to start and then stops soon after.
Annoyances
The edX platform has some annoying quirks I've documented elsewhere. But other than that it is pretty good.
V-REP is impressive also (coming from using Gazebo a great deal over the past six months), but has an annoying feature where a mouse right click can both rotate the view and open a context menu, the very first option is to close the 3D view window. So it is very possible especially on a laptop trackpad to accidentally try to rotate but end up closing the window of the view that was to be rotated.
Debugging steps (not part of the solution)
The first thing I tried was to launch vrep.sh from the vrep tar ball, load the exercise 1 ttt scene, and then enter the exercise1/code/common/vrep/ directory, launch octave, and try to run test.m:
octave:2> conn = simulation_setup();
/home/lwalter/own/edx_amrx/
octave:3> robot_nb=0
robot_nb = 0
octave:4> conn = simulation_openConnection(
error: simulation_openConnection: /home/lwalter/own/edx_amrx/
error: called from:
error: /home/lwalter/own/edx_amrx/
I have liboctinerp.so.1, but no liboctinterp.so, so in a user directory on my LD_LIBRARY_PATH I added links to it and other libraries that were subsequently not found:
ln -s /usr/lib/x86_64-linux-gnu/
ln -s /usr/lib/x86_64-linux-gnu/
ln -s /usr/lib/x86_64-linux-gnu/
Update - on a 13.04 Ubuntu I built the remApi.oct first, these steps are unnecessary.
Update - on a 13.04 Ubuntu I built the remApi.oct first, these steps are unnecessary.
I tried test.m again and ran into this problem:
octave:3> connection = simulation_openConnection(
error: simulation_openConnection: /home/lwalter/own/edx_amrx/
error: called from:
error: /home/lwalter/own/edx_amrx/
I saw some references to being able to rebuild remApi.oct, so set out to do that next.
2014-02-05
Text-to-speech audio books with text image videos for youtube
Down and Out in the Magic Kingdom by Cory Doctorow has a very permissive license for reuse, so I've gone through the steps of making an audio book with images of the text and putting it on youtube:
To do this, the first thing was to download the text from the Cory Doctorow site:
http://craphound.com/down/Cory_Doctorow_-_Down_and_Out_in_the_Magic_Kingdom.txt
There are some issues with text encoding that I mostly plowed through though I suspect another process for conversion to UTF8 could have worked better.
http://craphound.com/down/Cory_Doctorow_-_Down_and_Out_in_the_Magic_Kingdom.txt
There are some issues with text encoding that I mostly plowed through though I suspect another process for conversion to UTF8 could have worked better.
First thing is to get rid of some ampersand hash forty fives that I think were dashes in vim:
:%s/-//g
Also need to remove http://en.wikipedia.org/wiki/Specials_(Unicode_block) the U+FFFD unicode characters.
%s/\%uFFFD//g
%s/\%uFFFD//g
Also replacing tabs with spaces turned out to be necessary.
fmt ../Cory_Doctorow_-_Down_and_Out_in_the_Magic_Kingdom.txt > ../Cory_Doctorow_-_Down_and_Out_in_the_Magic_Kingdom_line_breaks.txt
for i in *.txt;
for i in *.txt;
rm all_videos.txt
There were still some odd question marks generated by convert in the text, I hand edit to get the worst one out- the one that would have appeared on the title of the book.
Next thing was to split the book at every blank line into roughly 1500 text files which will probably be short enough to show in a single image:
csplit -f down -b '%05d.txt' ../*.txt '/^$/' '{*}'
Next is the conversion of each of the split text files into HD png files
Next is the conversion of each of the split text files into HD png files
for i in *.txt;
do convert -background black -fill white -size 1920x1080 -pointsize 45 -gravity center label:"$(<$i)" PNG8:"$i.png";
done
And then generate wave files from each of the 1500 text files:
for i in *txt;
do pico2wave -w $i.wav "$(<$i)"
done
Videos are then created from putting the png images together with the images, this part is very similar to the process in http://binarymillenium.com/2013/07/turn-set-of-mp3s-into-static-image.html
And then generate wave files from each of the 1500 text files:
for i in *txt;
do pico2wave -w $i.wav "$(<$i)"
done
Videos are then created from putting the png images together with the images, this part is very similar to the process in http://binarymillenium.com/2013/07/turn-set-of-mp3s-into-static-image.html
for i in *.txt;
do avconv -loop 1 -r 1 -i "$i.png" -c:v libx264 -i "$i.wav" -c:a aac -b:a 32k -strict experimental -shortest "$i.mp4";
done
Some conversions result in 0 length mp4s with this error:
[buffer @ 0x8959e0] Invalid pixel format string '-1' ,
Some conversions result in 0 length mp4s with this error:
[buffer @ 0x8959e0] Invalid pixel format string '-1' ,
this turned out to be caused by some of the convert png images being 16-bit instead of 8-bit (why wasn't it consistent, most were 8-bit), but putting PNG8: into the convert command line fixed this.
Create a text file listing of all the mp4 files:
Create a text file listing of all the mp4 files:
rm all_videos.txt
for i in *mp4;
do
echo $i
echo "file '$i'" >> all_videos.txt
done
And concatenate all the mp4 files together into one giant 6 hour video with no recompression (only 500MB though):
And concatenate all the mp4 files together into one giant 6 hour video with no recompression (only 500MB though):
mkdir output
avconv -f concat -i all_videos.txt -c copy output/down_and_out.mp4
2014-02-03
Installing Full Desktop ROS Hydro from source on Ubuntu 13.10
Since there aren't any ROS packages for 13.10, I'm did a full catkin source install as specified in http://wiki.ros.org/hydro/Installation/Source. I'm also going to do a full gazebo 2.0 install from source in order to debug http://answers.gazebosim.org/question/5223/setting-projector-pose-vs-enclosing-link-pose/ .
As I understand it the proper use of catkin is to create a catkin workspace for all the standard ROS stuff, build and install it ( ./src/catkin/bin/catkin_make_isolated --install ) and then source the install setup.sh from that install ( source ~/ros_catkin_ws/install_isolated/setup.bash ) and then go on and create a new catkin workspace to actually do development in. Otherwise the build times will be ridiculous if catkin has to traverse 250 packages.
Since the core gazebo isn't a ros package (yet?) it ought to be built separately following the instructions on http://gazebosim.org/wiki/2.0/install .
I ran into this error near the end of the build:
I got a lot of these warnings but built 100% (haven't fully tested yet so they may yet cause problems):
/usr/bin/ld: warning: libboost_system.so.1.49.0, needed by /usr/lib/gcc/x86_64-linux-gnu/4.8/../../../x86_64-linux-gnu/libsdformat.so, may conflict with libboost_system.so.1.53.0
The post install bashrc instructions are not quite what is on the gazebo install page, I had to do this:
[ 10%] Building CXX object libstage/CMakeFiles/stage.dir/gl.o[ 12%] Building CXX object libstage/CMakeFiles/stage.dir/logentry.o/home/lwalter/other/ros_catkin_ws/src/stage/libstage/file_manager.cc:5:45: fatal error: config.h: No such file or directory #include "config.h" // to get INSTALL_PREFIX ^compilation terminated.[ 14%] make[2]: *** [libstage/CMakeFiles/stage.dir/file_manager.o] Error 1make[2]: *** Waiting for unfinished jobs....Building CXX object libstage/CMakeFiles/stage.dir/model.o/home/lwalter/other/ros_catkin_ws/src/stage/libstage/model.cc:141:45: fatal error: config.h: No such file or directory #include "config.h" // for build-time config ^compilation terminated.make[2]: *** [libstage/CMakeFiles/stage.dir/model.o] Error 1make[1]: *** [libstage/CMakeFiles/stage.dir/all] Error 2make: *** [all] Error 2<== Failed to process package 'stage':
Command '/home/lwalter/other/ros_catkin_ws/install_isolated/env.sh make -j4 -l4' returned non-zero exit status 2
Reproduce this error by running:==> cd /home/lwalter/other/ros_catkin_ws/build_isolated/stage && /home/lwalter/other/ros_catkin_ws/install_isolated/env.sh make -j4 -l4
vi /home/lwalter/other/ros_catkin_ws/src/stage/libstage/config.h
#define INSTALL_PREFIX "/home/lwalter/other/install/"
#define PLUGIN_PATH "/home/lwalter/other/install/usr/local/lib"
#define VERSION "3.0.2"
#define PROJECT "Stage"
That much worked, though those values may cause problems later if not correct.
(I didn't discover the gazebo bashrc instructions were wrong until after going through these steps, they probably aren't necessary)
Now it looks like the debian supplied sdfformat is conflicting with the one gazebo built, uninstall and rebuild the ros_caktin_ws
cd /home/lwalter/other/ros_catkin_ws/build_isolated/gazebo_plugins
cmake-gui .
...
type 'QX11EmbedWidget' is specified in typesystem, but not defined. This could potentially lead to compilation errors.
Segmentation fault (core dumped)
make[2]: *** [src/python_bindings/shiboken/librviz_shiboken/librviz_shiboken_module_wrapper.cpp] Error 139
make[2]: Leaving directory `/home/lwalter/other/ros_catkin_ws/build_isolated/rviz'
make[1]: *** [src/python_bindings/shiboken/CMakeFiles/rviz_shiboken.dir/all] Error 2
make[1]: Leaving directory `/home/lwalter/other/ros_catkin_ws/build_isolated/rviz'
make: *** [all] Error 2
Add the installation prefix of "GeneratorRunner" to CMAKE_PREFIX_PATH or
set "GeneratorRunner_DIR" to a directory containing one of the above files.
If "GeneratorRunner" provides a separate development package or SDK, be
sure it has been installed.
Call Stack (most recent call first):
src/python_bindings/shiboken/CMakeLists.txt:9 (include)
CMake Warning at /home/lwalter/other/ros_catkin_ws/install_isolated/share/python_qt_binding/cmake/shiboken_helper.cmake:41 (message):
Shiboken binding generator NOT available.
Call Stack (most recent call first):
src/python_bindings/shiboken/CMakeLists.txt:9 (include)
SIP binding generator available.
Python binding generators: sip
Configuring done
But the pacckages all build and install now.
Next try out building the catkin workspace with the projects I'm working on, the first thing missing appears to be the joy package, so clone it and rerun the catkin make install in the main ros catkin ws:
As I understand it the proper use of catkin is to create a catkin workspace for all the standard ROS stuff, build and install it ( ./src/catkin/bin/catkin_make_isolated --install ) and then source the install setup.sh from that install ( source ~/ros_catkin_ws/install_isolated/setup.bash ) and then go on and create a new catkin workspace to actually do development in. Otherwise the build times will be ridiculous if catkin has to traverse 250 packages.
Gazebo
I ran into this error near the end of the build:
[ 99%] Building CXX object interfaces/player/CMakeFiles/gazebo_player.dir/GazeboDriver.cc.o
In file included from /home/lwalter/other/gazebo_source/gazebo/interfaces/player/GazeboInterface.hh:26:0,
from /home/lwalter/other/gazebo_source/gazebo/interfaces/player/GazeboDriver.cc:25:
/home/lwalter/other/gazebo_source/gazebo/interfaces/player/player.h:22:38: fatal error: libplayercore/playercore.h: No such file or directory
#include <libplayercore/playercore.h>
So install libplayer-dev? No, that is a different player. I had libplayerc3.0-dev and libplayerc++3.0-dev installed already, and the file in question was located in /usr/include/player-3.0/libplayercore/playercore.h but gazebo wasn't seeing it.
I'm sure I could have done this cleaner, but I just hand-edited interfaces/player/CMakeLists.txt:
include_directories( /usr/include/player-3.0 ${SDF_INCLUDE_DIRS} ${PLAYER_INCLUDE_DIRS} ${OPENGL_INCLUDE_DIR} ${OGRE_INCLUDE_DIRS} ${Boost_INCLUDE_DIRS})
In file included from /home/lwalter/other/gazebo_source/gazebo/interfaces/player/GazeboInterface.hh:26:0,
from /home/lwalter/other/gazebo_source/gazebo/interfaces/player/GazeboDriver.cc:25:
/home/lwalter/other/gazebo_source/gazebo/interfaces/player/player.h:22:38: fatal error: libplayercore/playercore.h: No such file or directory
#include <libplayercore/playercore.h>
So install libplayer-dev? No, that is a different player. I had libplayerc3.0-dev and libplayerc++3.0-dev installed already, and the file in question was located in /usr/include/player-3.0/libplayercore/playercore.h but gazebo wasn't seeing it.
I'm sure I could have done this cleaner, but I just hand-edited interfaces/player/CMakeLists.txt:
include_directories( /usr/include/player-3.0 ${SDF_INCLUDE_DIRS} ${PLAYER_INCLUDE_DIRS} ${OPENGL_INCLUDE_DIR} ${OGRE_INCLUDE_DIRS} ${Boost_INCLUDE_DIRS})
I got a lot of these warnings but built 100% (haven't fully tested yet so they may yet cause problems):
/usr/bin/ld: warning: libboost_system.so.1.49.0, needed by /usr/lib/gcc/x86_64-linux-gnu/4.8/../../../x86_64-linux-gnu/libsdformat.so, may conflict with libboost_system.so.1.53.0
The post install bashrc instructions are not quite what is on the gazebo install page, I had to do this:
export DEST_DIR=/home/lwalter/other/install
export LD_LIBRARY_PATH=$DEST_DIR/lib/x86_64-linux-gnu/:$LD_LIBRARY_PATH
export PATH=$DEST_DIR/bin:$PATH
export PKG_CONFIG_PATH=PKG_CONFIG_PATH=$DEST_DIR/lib/x86_64-linux-gnu/pkgconfig:$DEST_DIR/lib/pkgconfig:$PKG_CONFIG_PATH
Something went wrong in the ros libstage package, it never generated a config.h from ros_catkin_ws/src/stage/config.h.in ( https://github.com/rtv/Stage/blob/master/config.h.in ) - possibly this was due to not having the environmental variables pointing at gazebo correctly.
export LD_LIBRARY_PATH=$DEST_DIR/lib/x86_64-linux-gnu/:$LD_LIBRARY_PATH
export PATH=$DEST_DIR/bin:$PATH
export PKG_CONFIG_PATH=PKG_CONFIG_PATH=$DEST_DIR/lib/x86_64-linux-gnu/pkgconfig:$DEST_DIR/lib/pkgconfig:$PKG_CONFIG_PATH
ROS
Something went wrong in the ros libstage package, it never generated a config.h from ros_catkin_ws/src/stage/config.h.in ( https://github.com/rtv/Stage/blob/master/config.h.in ) - possibly this was due to not having the environmental variables pointing at gazebo correctly.
[ 10%] Building CXX object libstage/CMakeFiles/stage.dir/gl.o[ 12%] Building CXX object libstage/CMakeFiles/stage.dir/logentry.o/home/lwalter/other/ros_catkin_ws/src/stage/libstage/file_manager.cc:5:45: fatal error: config.h: No such file or directory #include "config.h" // to get INSTALL_PREFIX ^compilation terminated.[ 14%] make[2]: *** [libstage/CMakeFiles/stage.dir/file_manager.o] Error 1make[2]: *** Waiting for unfinished jobs....Building CXX object libstage/CMakeFiles/stage.dir/model.o/home/lwalter/other/ros_catkin_ws/src/stage/libstage/model.cc:141:45: fatal error: config.h: No such file or directory #include "config.h" // for build-time config ^compilation terminated.make[2]: *** [libstage/CMakeFiles/stage.dir/model.o] Error 1make[1]: *** [libstage/CMakeFiles/stage.dir/all] Error 2make: *** [all] Error 2<== Failed to process package 'stage':
Command '/home/lwalter/other/ros_catkin_ws/install_isolated/env.sh make -j4 -l4' returned non-zero exit status 2
Reproduce this error by running:==> cd /home/lwalter/other/ros_catkin_ws/build_isolated/stage && /home/lwalter/other/ros_catkin_ws/install_isolated/env.sh make -j4 -l4
The really ugly hack solution is to create config.h by hand:
vi /home/lwalter/other/ros_catkin_ws/src/stage/libstage/config.h
#define INSTALL_PREFIX "/home/lwalter/other/install/"
#define PLUGIN_PATH "/home/lwalter/other/install/usr/local/lib"
#define VERSION "3.0.2"
#define PROJECT "Stage"
That much worked, though those values may cause problems later if not correct.
Telling ROS about Gazebo
==> cmake /home/lwalter/other/ros_catkin_ws/src/gazebo_plugins -...
CMake Error at CMakeLists.txt:40 (find_package):
By not providing "Findgazebo.cmake" in CMAKE_MODULE_PATH this project has asked CMake to find a package configuration file provided by "gazebo", but CMake did not find one.
Could not find a package configuration file provided by "gazebo" with any of the following names:
gazeboConfig.cmake
gazebo-config.cmake
Add the installation prefix of "gazebo" to CMAKE_PREFIX_PATH or set "gazebo_DIR" to a directory containing one of the above files. If "gazebo" provides a separate development package or SDK, be sure it has been installed.
-- Configuring incomplete, errors occurred!
<== Failed to process package 'gazebo_plugins':
Command '/home/lwalter/other/ros_catkin_ws/install_isolated/env.sh cmake /home/lwalter/other/ros_catkin_ws/src/gazebo_plugins -DCATKIN_DEVEL_PREFIX=/home/lwalter/other/ros_catkin_ws/devel_isolated/gazebo_plugins -DCMAKE_INSTALL_PREFIX=/home/lwalter/other/ros_catkin_ws/install_isolated' returned non-zero exit status 1
Reproduce this error by running:
==> cd /home/lwalter/other/ros_catkin_ws/build_isolated/gazebo_plugins && /home/lwalter/other/ros_catkin_ws/install_isolated/env.sh cmake /home/lwalter/other/ros_catkin_ws/src/gazebo_plugins -DCATKIN_DEVEL_PREFIX=/home/lwalter/other/ros_catkin_ws/devel_isolated/gazebo_plugins -DCMAKE_INSTALL_PREFIX=/home/lwalter/other/ros_catkin_ws/install_isolated
Command failed, exiting.
It can't find gazebo, so run cmake-gui . in ros_catkin_ws/build_isolated/gazebo_plugins and set gazebo_DIR to
/home/lwalter/other/install/share/gazebo/cmake
CMake Error at CMakeLists.txt:40 (find_package):
By not providing "Findgazebo.cmake" in CMAKE_MODULE_PATH this project has asked CMake to find a package configuration file provided by "gazebo", but CMake did not find one.
Could not find a package configuration file provided by "gazebo" with any of the following names:
gazeboConfig.cmake
gazebo-config.cmake
Add the installation prefix of "gazebo" to CMAKE_PREFIX_PATH or set "gazebo_DIR" to a directory containing one of the above files. If "gazebo" provides a separate development package or SDK, be sure it has been installed.
-- Configuring incomplete, errors occurred!
<== Failed to process package 'gazebo_plugins':
Command '/home/lwalter/other/ros_catkin_ws/install_isolated/env.sh cmake /home/lwalter/other/ros_catkin_ws/src/gazebo_plugins -DCATKIN_DEVEL_PREFIX=/home/lwalter/other/ros_catkin_ws/devel_isolated/gazebo_plugins -DCMAKE_INSTALL_PREFIX=/home/lwalter/other/ros_catkin_ws/install_isolated' returned non-zero exit status 1
Reproduce this error by running:
==> cd /home/lwalter/other/ros_catkin_ws/build_isolated/gazebo_plugins && /home/lwalter/other/ros_catkin_ws/install_isolated/env.sh cmake /home/lwalter/other/ros_catkin_ws/src/gazebo_plugins -DCATKIN_DEVEL_PREFIX=/home/lwalter/other/ros_catkin_ws/devel_isolated/gazebo_plugins -DCMAKE_INSTALL_PREFIX=/home/lwalter/other/ros_catkin_ws/install_isolated
Command failed, exiting.
It can't find gazebo, so run cmake-gui . in ros_catkin_ws/build_isolated/gazebo_plugins and set gazebo_DIR to
/home/lwalter/other/install/share/gazebo/cmake
SDFormat
cd /home/lwalter/other/ros_catkin_ws/build_isolated/gazebo_plugins
cmake-gui .
SDFormat_DIR needs to be set to
/home/lwalter/other/install//lib/x86_64-linux-gnu/cmake/sdformat
Have to set the above for several packages.
Linking CXX shared library /home/lwalter/other/ros_catkin_ws/devel_isolated/rviz/lib/libdefault_plugin.so
[ 95%] Built target default_plugin
make: *** [all] Error 2
<== Failed to process package 'rviz':
Command '/home/lwalter/other/ros_catkin_ws/install_isolated/env.sh make -j4 -l4' returned non-zero exit status 2
Reproduce this error by running:
==> cd /home/lwalter/other/ros_catkin_ws/build_isolated/rviz && /home/lwalter/other/ros_catkin_ws/install_isolated/env.sh make -j4 -l4
Investigate this with make VERBOSE=1
/home/lwalter/other/install//lib/x86_64-linux-gnu/cmake/sdformat
Have to set the above for several packages.
RVIZ build problems with libshiboken
Linking CXX shared library /home/lwalter/other/ros_catkin_ws/devel_isolated/rviz/lib/libdefault_plugin.so
[ 95%] Built target default_plugin
make: *** [all] Error 2
<== Failed to process package 'rviz':
Command '/home/lwalter/other/ros_catkin_ws/install_isolated/env.sh make -j4 -l4' returned non-zero exit status 2
Reproduce this error by running:
==> cd /home/lwalter/other/ros_catkin_ws/build_isolated/rviz && /home/lwalter/other/ros_catkin_ws/install_isolated/env.sh make -j4 -l4
Investigate this with make VERBOSE=1
...
type 'QX11EmbedWidget' is specified in typesystem, but not defined. This could potentially lead to compilation errors.
Segmentation fault (core dumped)
make[2]: *** [src/python_bindings/shiboken/librviz_shiboken/librviz_shiboken_module_wrapper.cpp] Error 139
make[2]: Leaving directory `/home/lwalter/other/ros_catkin_ws/build_isolated/rviz'
make[1]: *** [src/python_bindings/shiboken/CMakeFiles/rviz_shiboken.dir/all] Error 2
make[1]: Leaving directory `/home/lwalter/other/ros_catkin_ws/build_isolated/rviz'
make: *** [all] Error 2
There is some discussion of probably the same issue at
https://aur.archlinux.org/packages/ros-hydro-rviz/
The solution seems to be to remove shiboken:
sudo apt-get remove libshiboken-dev
Cmake generates this new warning output:
https://aur.archlinux.org/packages/ros-hydro-rviz/
The solution seems to be to remove shiboken:
sudo apt-get remove libshiboken-dev
Cmake generates this new warning output:
Add the installation prefix of "GeneratorRunner" to CMAKE_PREFIX_PATH or
set "GeneratorRunner_DIR" to a directory containing one of the above files.
If "GeneratorRunner" provides a separate development package or SDK, be
sure it has been installed.
Call Stack (most recent call first):
src/python_bindings/shiboken/CMakeLists.txt:9 (include)
CMake Warning at /home/lwalter/other/ros_catkin_ws/install_isolated/share/python_qt_binding/cmake/shiboken_helper.cmake:41 (message):
Shiboken binding generator NOT available.
Call Stack (most recent call first):
src/python_bindings/shiboken/CMakeLists.txt:9 (include)
SIP binding generator available.
Python binding generators: sip
Configuring done
But the pacckages all build and install now.
Misc
git clone https://github.com/ros-drivers/joystick_drivers.git
sudo apt-get install libusb-dev libspnav-dev
sudo apt-get install libusb-dev libspnav-dev
What I don't understand about re-running ./src/catkin/bin/catkin_make_isolated --install is how much stuff has to be re-done even when nothing or very little has changed. Object files are correctly recognized as already compiled, but something high level gets dirtied and many shared libraries and scripts have to be rerun to presumably generate the exact same output files that were already generated.
2013-10-24
Software Archaeology #1: GPS tagged street video
Around 10 years ago I was working on a number of personal software projects with a mostly common C++ code-base that had a lot of boilerplate OpenGL and vector classes I'd built up from reading the NeHe tutorials. Some of that work was properly documented and put into source control and madee public, the rest were periodically made into version numbered tarballs. When I finished or lost interest in developing some graphics technique or physics simulation or anything else I would rename the directory to reflect the new project and start on new functionality: some of old was still useful, some of it had to get ifdeffed out, and some just sat unused. Some of those were documented but not open-sourced, and a few of those tarballs were archived in my online home directory. Eventually a lot of the code was superseded by vastly superior open source libraries so it didn't make sense to continue using it, but I would sometimes make backups of the old stuff on DVD and copy them to multiple hard drives as I bought them but with less and less care as time went by.
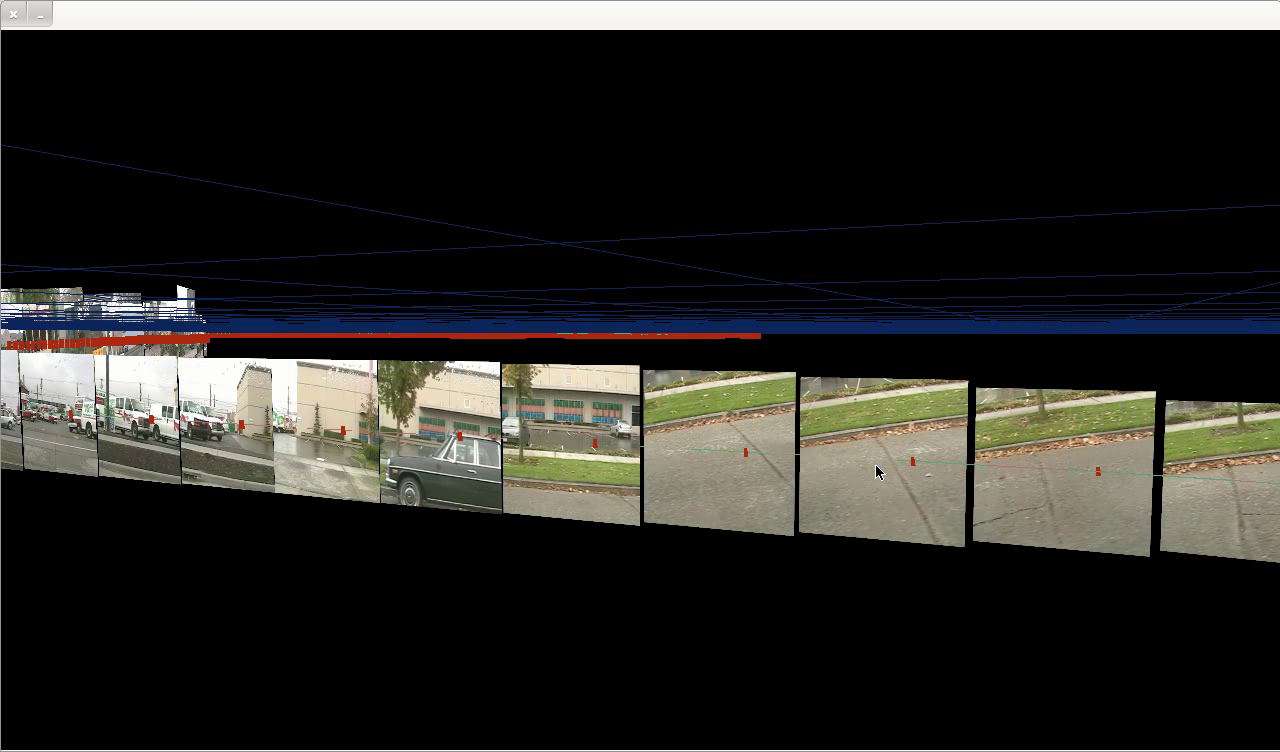
 Fast forward to the present, and reading a section of Planet Google about StreetView, and I started thinking about a particular project where I was driving around Seattle with a DV camera mounted in on the passenger side and a GPS on my roof being logged on a laptop. I'm pretty sure I was inspired by reading about the Aspen Movie Map from the +Howard Rheingold book Virtual Reality.
Fast forward to the present, and reading a section of Planet Google about StreetView, and I started thinking about a particular project where I was driving around Seattle with a DV camera mounted in on the passenger side and a GPS on my roof being logged on a laptop. I'm pretty sure I was inspired by reading about the Aspen Movie Map from the +Howard Rheingold book Virtual Reality.






A few other old projects could be revived, though some have more obscure dependencies (paragui and maybe another opengl gui). It's not a high priority but it would be nice to create better records now than wait even longer for more bitrot to set in, and I have a restored interest in low-ish level OpenGL so it would be nice to get refreshed on the stuff I've already done.

Some OpenGL software loaded the images extracted from the video and then displayed them on top of a 3D GPS trajectory. It worked fine, but I only did it once and took no screenshots or videos and told no more than one or two people about it. Maybe I thought it was a such a good idea it had to be kept secret until the opportunity to capitalize arose, obviously the opportunity is now long past. But it it still was fun to have done and having it run again would be cool... but I couldn't find it on any of my still running desktop computers or laptops. Eventually I found a 250GB Maxtor drive in a shoebox and plugged it in with a usb-to-sata adapter, and there it was: 700 megabytes of video and images all nicely organized along with scripts and source code. And it compiled: after resolving the SDL dependencies the only thing I had to do was move the ordering -lGL etc. linker options to be after the listing of object files: $(CXX) -o $(PROGRAM) $(OBJECTS) $(LIBS) instead of $(CXX) -o $(PROGRAM) $(LIBS) $(OBJECTS). And it ran fine with ./gpsimage --gps ../capture_10_22_
 |
| Ballard surface streets |

 |
| Ballard surface streets |


 |
| Exiting the tunnel to get on the viaduct |
 |
| Driving south on the 99 viaduct looking west |

Implementation
It might be nice to actually check in some of the code to github or something, but for now I'll document the important parts here.
I used dvgrab to extract video from the camera, and converted that to decimated timestamped bmp images. The text gps log which looks like this:
$GPGGA,162651.395,4740.2379,N,12222.4207,W,1,06,1.5,15.0,M,-17.3,M,0.0,0000*7E
$GPGSA,A,3,23,13,16,20,01,25,,,,,,,2.8,1.5,2.4*3A
$GPGSV,3,1,09,23,81,041,46,13,51,298,48,16,46,083,46,20,42,175,44*7F
$GPGSV,3,2,09,01,20,100,37,04,19,284,34,27,19,240,40,25,16,061,40*7E
$GPGSV,3,3,09,24,12,320,30*47
$GPRMC,162651.395,A,4740.2379,N,12222.4207,W,22.57,179.63,221004,,*2C
$GPGGA,162652.395,4740.2316,N,12222.4208,W,1,06,1.5,14.4,M,-17.3,M,0.0,0000*7E
$GPGSA,A,3,23,13,16,20,01,25,,,,,,,2.8,1.5,2.4*3A
$GPRMC,162652.395,A,4740.2316,N,12222.4208,W,22.64,178.75,221004,,*2F
$GPGGA,162653.395,4740.2253,N,12222.4208,W,1,06,1.5,13.8,M,-17.3,M,0.0,0000*74
$GPGSA,A,3,23,13,16,20,01,25,,,,,,,2.8,1.5,2.4*3A
$GPRMC,162653.395,A,4740.2253,N,12222.4208,W,22.76,178.28,221004,,*25
$GPGGA,162654.395,4740.2189,N,12222.4208,W,1,06,1.5,13.2,M,-17.3,M,0.0,0000*7D
$GPGSA,A,3,23,13,16,20,01,25,,,,,,,2.8,1.5,2.4*3A
...
was converted like this:
ifstream parts(fileName.c_str());
if (!parts) {
OUT("File \"" << fileName << "\" not found.");
exit(1);
}
vector3f initialPos;
string lines;
while (getline(parts,lines)) {
//cout << lines << "\n";
vector<string> tokens = tokenize(lines,",");
if ((tokens.size() > 0) && (tokens[0] == "$GPGGA") && tokens.size() > 9) {
float rawTime = atof(tokens[1].c_str());
int tsec = (int)rawTime%100;
int tmin = ((int)rawTime/100)%100;
/// convert to local time
int thr = (int)rawTime/10000 -7;
float time = (float)thr + ((float)tmin+tsec/60.0f)/60.0f;
vector3f pos = vector3f(10000.0f*atof(tokens[2].c_str())-initialPos[0],
atof(tokens[9].c_str())-initialPos[1],
-10000.0f*atof(tokens[4].c_str())- initialPos[2]
);
if (initialPos == vector3f()) {
initialPos = pos;
pos = vector3f(0,0,0);
}
pair<float,vector3f> tp(time,pos);
timePos.push_back(tp);
}
}
(tokenize was a function to split up lines of text, I think the standard C++ libraries didn't do that at the time)
The timestamped bmp files look like this in a directory:
vid_2004.10.20_09-24-49.bmp
vid_2004.10.20_09-24-50.bmp
vid_2004.10.20_09-24-51.bmp
vid_2004.10.20_09-24-52.bmp
vid_2004.10.20_09-24-53.bmp
vid_2004.10.20_09-24-54.bmp
...
And read in like this:
ifstream bmpList(bmpListFileName.c_str());
if (!bmpList) {
OUT("File \"" << fileName << "\" not found.");
exit(1);
}
while (getline(bmpList,lines)) {
vector<string> tokens = tokenize(lines,".");
if (tokens.size() > 3) {
string messyTime = tokens[tokens.size()-2];
vector<string> items = tokenize(tokenize(messyTime,"-"),"_");
if (items.size() == 4) {
//OUT( items[1] << ":" << items[2] << ":" << items[3]);
float time = atof(items[1].c_str())
+(atof(items[2].c_str())
+(atof(items[3].c_str())/60.0f))/60.0f;
/// arbitrary offset to match gps to images better
time += .012f;
timeImage.push_back(pair<float,string>(time,lines));
} else {
OUT("list time wrongly formatted " << messyTime);
}
} else {
OUT("list items have wrong format" << lines);
}
}
Then brute force O(n^2) the correspondence between image timestamps and gps timestamps:
/// using the times extracted from the bmp file names, find what the closest
/// gps coordinates for those times
for (unsigned i = 0; i < timeImage.size(); i++) {
for (unsigned j = 0; j < timePos.size()-1; j++) {
if ((timePos[j].first <= timeImage[i].first)
&& (timePos[j+1].first > timeImage[i].first)) {
struct tpi newTpi;
newTpi.time = timeImage[i].first;
/// interpolate - is this working?
float factor = (newTpi.time - timePos[j].first)
/ (timePos[j+1].first - timePos[j].first);
//OUT(i << " " <<j << " " <<factor);
newTpi.pos = timePos[j].second
+ (timePos[j+1].second - timePos[j].second) * factor;
createTexture(newTpi.texture, timeImage[i].second);
/// don't interpolate just use the same point
//newTpi.pos = timePos[j].second;
/// attitude
vector3f up = vector3f(0,1.0f,0);
/// this is arbitrary based on the fact the video was shot at a right angle to
/// the direction of travel
vector3f right = (timePos[j+1].second - timePos[j].second);
right = right/right.Length();
// make all axes orthogonal
vector3f out = Cross(up,right);
up = Cross(right,out);
// normalize
out = out/out.Length();

up = up/up.Length();
newTpi.attitude.Set(right,up,out);
/// scale
if (i >0) {
newTpi.scale = (newTpi.pos - tpiList[i-1].pos).Length()/2.0f;
} else {
newTpi.scale = 5.0f;
}
tpiList.push_back(newTpi);
}
}
}
And then draw it later:
void gps::draw()
{
/// the gps signal
glPushAll();
glColor3f(0.67398f,.459f, 0.459f);
glBegin(GL_LINE_STRIP);
for (unsigned i = 0; i <timePos.size(); i++) {
/// subtract first position to make path always start from origin
glVertex3fv((timePos[i].second).vertex);
}
glEnd();
glColor3f(0.67398f,.159f, 0.059f);
glPointSize(9.0f);
glBegin(GL_POINTS);
for (unsigned i = 0; i <timePos.size(); i++) {
/// subtract first position to make path always start from origin
glVertex3fv((timePos[i].second).vertex);
}
glEnd();
/// interpolated image position
glColor3f(0.37398f,.659f, 0.459f);
glBegin(GL_LINE_STRIP);
for (unsigned i = 0; i <tpiList.size(); i++) {
glVertex3fv((tpiList[i].pos).vertex);
}
glEnd();
/* glColor3f(0.17398f,0.559f, 0.859f);
glPointSize(10.0f);
glBegin(GL_POINTS);
for (unsigned i = 0; i <tpiList.size(); i++) {
glVertex3fv((tpiList[i].pos).vertex);
}
glEnd();
*/
glPopAll();
glPushAll();
glEnable(GL_TEXTURE_2D);
glColor3f(1.0f,1.0f,1.0f);
/// always pointed at camera
//matrix16f temp = Registry::instance()->theCamera->location;
//temp.SetTranslation(vector3f(0.0f,0.0f,0.0f));
vector3f loc = Registry::instance()->theCamera->location.GetTranslation();
int oldI = 0;
for (unsigned i = 0; i <tpiList.size(); i++) {
float scale = tpiList[i].scale;
/// simple distance culling
float dist = (loc - tpiList[i].pos).Length();
/*if ((dist >= 5000)) {
/// make far away textures bigger, and show less of them
float f= dist/5000;
f =f*f;
i += (int)f+1;
scale*= f;
}*/
if ((dist > 3000) && (dist <= 8000)) {
if (i%5==0) {
//i+=10;
scale *=5;
} else {
dist = 20000;
}
}
if (dist > 8000) {
if (i%10==0) {
//i+=10;
scale *=10;
} else {
dist = 20000;
}
glColor3f(1.0f,1.0f,1.0f);
/// always pointed at camera
//matrix16f temp = Registry::instance()->theCamera->location;
//temp.SetTranslation(vector3f(0.0f,0.0f,0.0f));
vector3f loc = Registry::instance()->theCamera->location.GetTranslation();
int oldI = 0;
for (unsigned i = 0; i <tpiList.size(); i++) {
float scale = tpiList[i].scale;
/// simple distance culling
float dist = (loc - tpiList[i].pos).Length();
/*if ((dist >= 5000)) {
/// make far away textures bigger, and show less of them
float f= dist/5000;
f =f*f;
i += (int)f+1;
scale*= f;
}*/
if ((dist > 3000) && (dist <= 8000)) {
if (i%5==0) {
//i+=10;
scale *=5;
} else {
dist = 20000;
}
}
if (dist > 8000) {
if (i%10==0) {
//i+=10;
scale *=10;
} else {
dist = 20000;
}
}
if (dist < 16000) {
glBindTexture(GL_TEXTURE_2D, tpiList[i].texture);
glBegin(GL_QUADS);
matrix16f temp = tpiList[i].attitude;
glTexCoord2f(0.0f, 0.0f);
glVertex3fv((tpiList[i].pos+temp.Transform(scale*vector3f(1.0,1.0,0.0))).vertex);
glTexCoord2f(1.0f, 0.0f);
glVertex3fv((tpiList[i].pos+temp.Transform(scale*vector3f(-1.0,1.0,0.0))).vertex);
glTexCoord2f(1.0f, 1.0f);
glVertex3fv((tpiList[i].pos+temp.Transform(scale*vector3f(-1.0,-1.0,0.0))).vertex);
glTexCoord2f(0.0f, 1.0f);
glVertex3fv((tpiList[i].pos+temp.Transform(scale*vector3f(1.0,-1.0,0.0))).vertex);
glEnd();
}
oldI = i;
}
glPopAll();
}
Future
A few other old projects could be revived, though some have more obscure dependencies (paragui and maybe another opengl gui). It's not a high priority but it would be nice to create better records now than wait even longer for more bitrot to set in, and I have a restored interest in low-ish level OpenGL so it would be nice to get refreshed on the stuff I've already done.
Subscribe to:
Comments (Atom)